
Sonar na ryby, neboli jiným názvem echolot, funguje na jednoduchém principu. Vysílá zvukové vlny, které nemůžete slyšet. Sonda ale dokáže zachytit jejich odraz. Mikroprocesor v echolotu odrazy zpracuje do grafické podoby a ukáže na displeji. Díky tomu můžete vidět dno nebo předměty, které se nachází ve vodě, jako třeba ryby.
Jen tak pro zajímavost, zvukové vlny, které sonar používá se nejlépe odráží od předmětů s výrazně jinou hustotou než je hustota vody. Proto dokáže moderní sonar na ryby odlišit třeba tvrdé dno od měkkého nebo dokonce listí a trávy na dně.
S rybami plavajícími ve sloupci je to složitější. Ryba je díky hustotě těla pro echolot hůře detekovatelná. Paradoxně největší odraz dává z celého těla ryby její plynový měchýř. Proto někdy sonar ukazuje „duchy“. Každá bublina plynu ve vodě nebo za peřejí se může na některých sonarech zobrazit, třeba jako hejno menších ryb.
Jak sonar na ryby ukáže, co plave pod lodí
Zapomeňte na ikony ryb. To je pravěk, který dnešní echoloty mají tak maximálně jako funkci pro začátečníky. Jakýkoliv předmět ve vodním sloupci se zobrazuje jako jakýsi oblouk. To je surové zobrazení, které vychází z toho jak echolot funguje. Ikony je nejlepší vypnout.
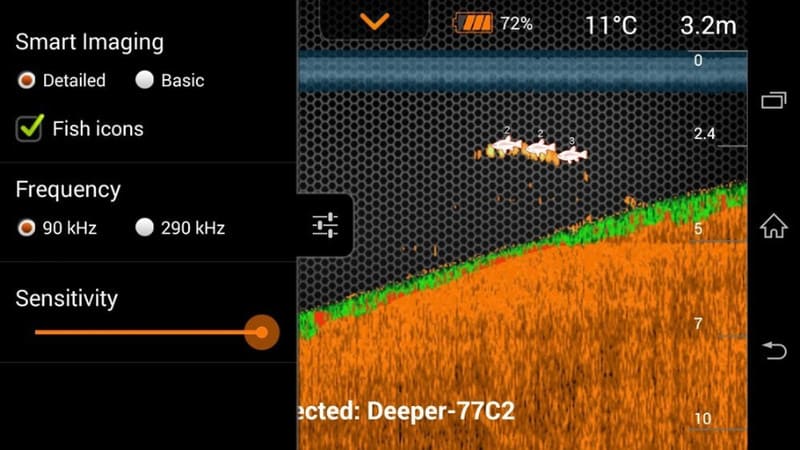

*Oblouky na obrazovce znázorní jakýkoliv předmět ve vodě. Nám jde samozřejmě o ryby, kdyby tam byl ale potápěč, tak bude vidět taky.
Zobrazení těchto oblouků je poměrně složitá technická věc. Oblouk vznikne díky tomu, jak se ryba pohybuje v kuželu, kterým sonda echolotu posílá zvuk je dnu. Oblouky mají vždy různý tvar a vážně vždy neplatí, že čím větší oblouk tím větší ryba.
Doufám, že vás neurazí trochu geometrie. Představte si kužel. To je tvar, kterým echolot zkoumá dno. Ještě lepší přirovnání je obyčejná baterka. Představte si, že máte v ruce klasickou ruční baterku a svítíte si na dno. Hned u lodi je paprsek malý, na dně v hloubce ale dělá daleko větší kolo.
Takhle přesně vypadá i zvukový paprsek echolotu, akorát s tím rozdílem, že není vidět.
Echolot může zkreslovat velikosti i polohu ryb
Problém zobrazení velikosti spočívá v tom, že sonar zobrazuje dění na časové ose. Pokud si nekoupíte dražší model se technologií live apod, tak zobrazení dna běží na obrazovce z jedné strany na druhou a délku zobrazeného oblouku ovlivňuje i to, jak dlouho ryba v paprsku setrvá.
Ukážeme si teoretický příklad, jak sonar na ryby fixluje. Odborníky prosím o shovívavost, vycházejme z toho, že loď stojí a ryba plave rovně. V praxi je to většinou daleko složitější protože se může hýbat i loď a ryba může plavat šikmo, klikatě atd. Tyhle věci ale nyní zanedbáme.
Ryba, která pluje blízko hladiny projede úzkou částí kuželu přímo pod sondou a stráví v zorném poli echolotu jen chvíli. Echolot vytvoří na obrazovce oblouk určité velikosti.
Ta samá ryba může ale proplout kuželem přímo pod sondou ve větší hloubce u dna, kde se zvukový paprsek promítá na větší plochu. Rybě trvá proplutí delší dobu a oblouk je větší.
V obou případech má ryba stejné rozměry ale echolot jednu zobrazí jako větší.
Aby to nebylo jednoduché: další rozdíl může vzniknout i tím, že jedna ryba plave přímo pod vámi ale druhá kužel jen štrejchne po straně. V takovém případě se může i relativně velká ryba v hloubce ukázat menším obloukem.
Oblouk se zmenšuje také tím, že ryba stoupá nahoru a opačně. Při tomhle pohybu vám může navíc i zmizet z obrazovky. Stačí aby plavala po straně kuželu a při pohybu kolmo nahoru z něj vyjela. Klasický 2D echolot bez pokročilých technologií neumí rozlišit jestli ryba stojí bokem nebo pod vámi a z toho vzniká chybná interpretace.
Velikost ryby se musíte naučit odhadovat podle těchto parametrů:
- Tloušťka zobrazeného oblouku
- Jeho barva (odstín)
- Orientačně i délka oblouku
Ryba nemusí být pod vámi
U klasických echolotů máme trochu problém. Kužel, kterým paprsek sonaru prochází do vody je trojrozměrný. Obrazovka je jen dvojrozměrná. Z toho plyne, že zobrazení musí trojrozměrnost zanedbat a ryby zobrazit v jedné rovině. Ačkoliv sonda zachytí informaci o tom, z jaké části kuželu odraz přišel. Pro zobrazení toto musí zanedbat a ryby ukáže v jedné vertikální rovině.
Každá ryba pak vypadá jakoby stála pod lodí. To většinou není pravda, čím větší hloubka tím větší pravděpodobnost máte, že ten odraz na echu je někde bokem od vás. Chyba v zobrazení může na hloubce činit mnoho metrů a vy nemáte tušení ani o tom, jestli stojí alespoň vlevo nebo vpravo od vás. Tohle řeší až lepší echoloty se Side Scanem a podobnými technologiemi, které přesněji zobrazují co je stranou od vás.
U klasického 2D zobrazení máte ale smůlu. Na displeji to vypadá, že všechen život ve vodě se seřadil v jedný lajně od hladiny ke dnu.
Pokud vidíte na obrazovce tři oblouky, tak je reálně možné, že jedna ryba stojí x metrů vpravo od vás, druhá několik metrů před vámi a třetí taky bůhvíkde bokem. Echolot se přitom tváří, že plavou vedle sebe.
Dokáže sonar na ryby ukázat přesně druh ryby?
Mezi rybáři je hodně slyšet, že sonar na ryby kazí romantiku chytání. Tu ale kazí i hlásiče, zavážecí lodě, výkonné rybářské čluny a dalších X věcí, které si můžete teoreticky koupit.
Není pravda, že sonar na ryby vám ukáže přesně druh ryby. Vidíte oblouk nebo ikonku ryby. Co je to zač poznat není a rozlišit třeba kapra od dravce podobné velikosti nelze. Je ale pár výjimek, kdy se druh ryby dá celkem kvalifikovaně odhadnout i bez pokročilých technologií a sonarů za mnoho desítek tisíc. Těmito výjimkami jsou hlavně:
- Vertikální přívlač
- Vertikální lov sumců na vábničku
Technicky vzato jsou tyto metody lovu podobné. V obou případech lovíme pod lodí, echolot je většinou schopný zobrazit i pohyb naší nástrahy a je dobře pozorovatelné, když se za ní ryba zvedne. Potom můžeme usuzovat, že jde například o sumce nebo candáta.
Je možné jezdit s echolotem po přehradě a hledat velkou rybu?
Ano, to možné je a s těmi nejvíce předřazenými technologiemi to jde vcelku dobře. Každý si musí sám zodpovědět, zda je to ještě rybaření podle jeho představ. V Česku tyto metody zatím nedošly k velkému rozmachu, neboť u nás je většina velkých ryb na echu kapr. Pouštět mu boilies před nos asi není ta správná metoda lovu….
V zahraničí se takto loví například trofejní dravci, kteří se pohybují ve sloupci daleko od břehu. Funguje to například ve Švédsku, kde je dostatek velkých jezer i mnohonásobně víc trofejních ryb žijících na volné vodě.
Active Imaging – technologie, která ukáže i pneumatiku na dně
Jestli se něčemu nedá zabránit, tak je to technologický pokrok. Levnější echoloty echoloty zatím až tak dokonalý vhled pod hladinu nemají. Dokáží velmi dobře vykreslit dno, včetně jeho struktury nebo tvrdosti. Dál už je to hlavně na schopnostech rybáře.
Podíváme-li se ovšem na dražší typy echolotů, budeme se dost divit. Klasický vertikální pohled na paprsek echolotu je už dávno překonaná věc. Nové echoloty umí přenášet obraz dění pod vodou v reálném čase a také dokáží zobrazit pohled do stran.

Lowrance nabízí technologii Active Imaging, která tyto vymoženosti kombinuje a dovede s neuvěřitelnou názorností vykreslit dno.
Je to jako byste měli ve vodě kameru, která snímá kompletně celé dno pod vámi. Vidíte utopené loďky, hozené pneumatiky a všechen bordel, co se v našich vodách válí. Samozřejmě také dokonale rozpoznáte struktury dna, hloubky, nerovnosti, vodní rostliny a překážky. Je to technický zázrak, který má zatím jednu nevýhodu. Tou je poměrně vysoká cena. Za takových deset nebo patnáct let ale takový echolot bude mít možná každý druhý rybář.
Je tedy otázka, zda právě neprožíváme poslední roky klasické rybařiny. Té, která je více spojená s přírodou než s technikou.
Buďte první kdo přidá komentář